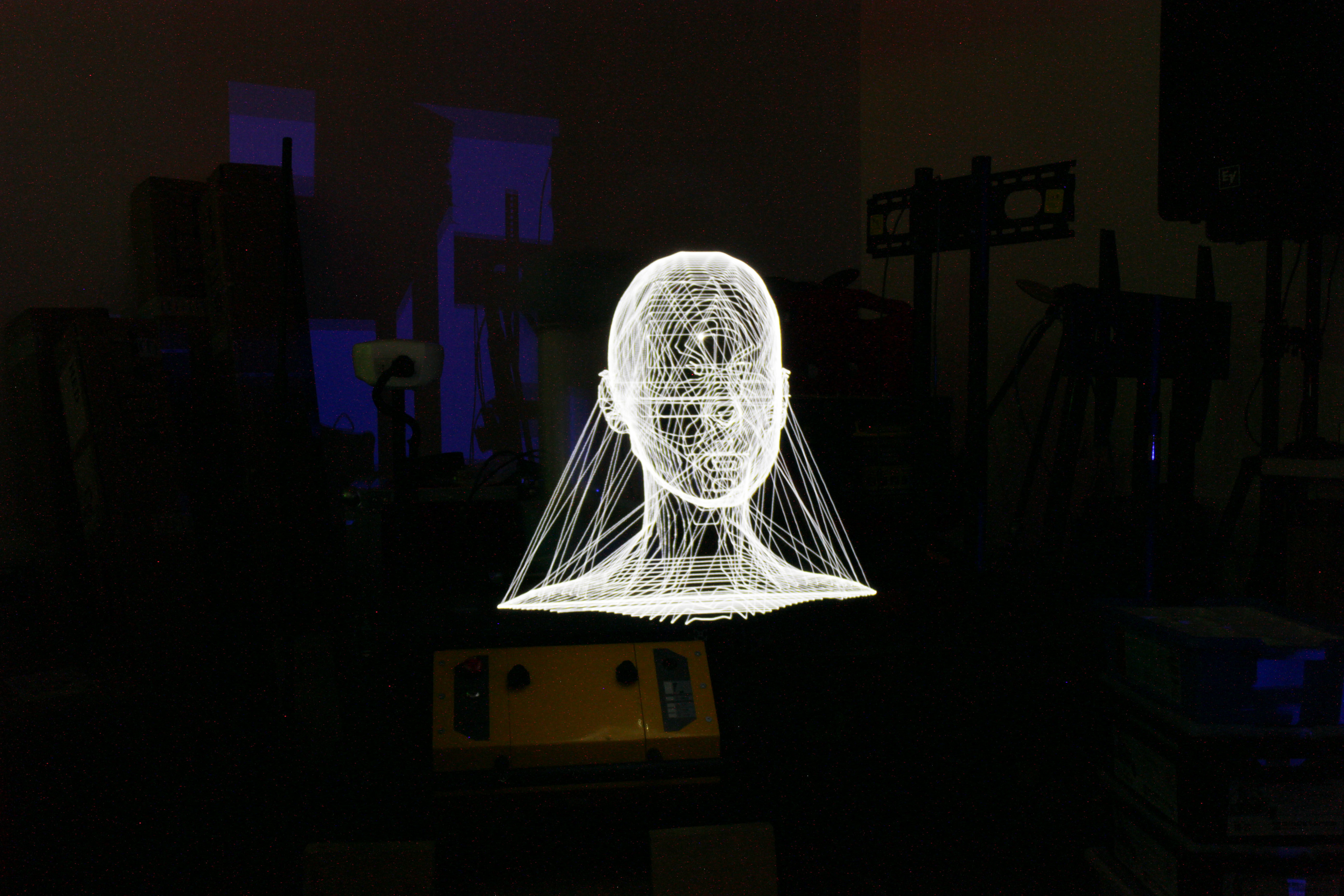
Parametric modelling applied to design an algorithm for 3d sculpting for any robot arm, in this example is explained using an industrial manipulator from Universal Robots model UR10 (picture below is light printing). Video explains the usage of this algorithm, which from a 3d scan can adapts to any volume automatically to be performed a sculpting task(milling,, light printing) by the robot, without the need to recalculate manually the path planning for the robot arm as this algorithm would automatize this process. Rhinoceros 3d / Grasshopper *Skip to minute 25 for a real demonstration with the UR10.